





.jpg)

随着国内汽车生产厂生产规模的不断扩大,车型翻新的周期也不断加快,多种车型共线生产的状况也越来越普遍。越来越多的生产管理人员开始关注这样的生产信息:一辆某种型号的车体在生产过程中的加工状态和位置、匹配于该车体的各种部件的生产状态和分布位置,以及部件的最终匹配安装是否成功。为了实现以上生产信息的显示,人们很自然地想到可以使用可编程控制器和传统的人机界面软件来跟踪车体的生产。但是,无论是可编程控制器还是人机界面软件,对于大规模的车体跟踪都显得数据存储不灵活、柔性化不高。通用电气公司汽车工业部基于以往的工程实例和项目经验提出的“车体跟踪及控制系统”即是提供如上生产跟踪信息的、基于Windows和CIMPLICITYTracker软件平台的一个解决方案。这里以两个汽车生产过程中的实例来说明车体跟踪的意义及实际的解决方案。
焊接车间车身侧围与车身底盘的匹配
焊接车间的总拼工段是整个车间雏形。通常,该工段由传送带和若干台焊接机器人组成。
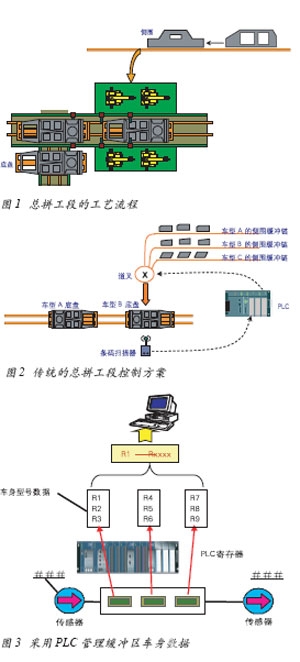
总拼工段的工艺流程如下(图1):车身侧围被预先制作、存放在缓冲区内,当车身底盘被传送带送到焊接工位时,相应的车身侧围也应被送到该工位以完成拼装焊接操作。
采用传统的PLC可以实现总拼工段的自动控制,其具体思路如下(图2):车身侧围缓冲区按车型划分成若干条缓冲链,每条缓冲链存放一种车型的侧围部件。当车身底盘到达焊接工位时,底盘上的条码标识被条码扫描器读出,焊接工位的可编程控制器由此获知车身的型号。车身型号也被发送到侧围缓冲区的PLC,由该PLC根据收到的车身型号释放相应的侧围缓冲链,向焊接工位输送正确的侧围部件。
以上控制方案的不足之处在于:侧围缓冲区需要为每种车型分配缓冲链,其构造比较复杂。控制系统不能为较多的车体预先缓存其侧围部件,并完成排序,阻碍了总拼工段的工作节拍的提高。此外,生产管理人员也需要一种图形化的界面,以随时查看侧围缓冲区的部件分布及其排序状况。为了实现图形监控的要求,侧围缓冲区的每个存储单元内所存放的侧围部件的型号数据应该堆积在PLC的寄存器中,并上传给监控计算机(图3),这对PLC的数据存储内存和网络的通讯能力也提出了较高的要求。
如果有一种新的控制方案能够读取即将到达总拼工段的车身的型号、提前为车身侧围排序,将三条侧围缓冲链减少为一条,并可方便地在计算机上存储、显示缓冲区的车身侧围分布情况及其汇总信息,那将提高总拼工段的生产节拍,提供更直观、形象的生产监控画面。
WBS和PBS缓冲区的控制
柔性化的汽车生产要求每辆车体在生产过程中佩带一个标识本车体生产信息的标签(RF Tag或条型码),该标签记录了本车体的车型、颜色、选装件、内饰选项及交货日期等车身属性数据。
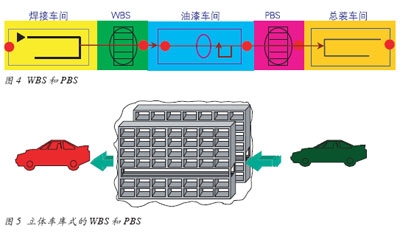
当白车身佩带标签离开焊接车间,进入白车身缓冲区WBS (White BodyStorage)后,白车身在此根据车身颜色及车辆交货日期重新排序,最理想的排序结果是:交货日期紧的、相同颜色的车体被成组送往油漆车间,已喷漆的车体离开油漆车间后,即进入 PBS(Painted Body Storage)缓冲区(图4)。车体在此根据车型、内饰选项、交货日期及总装车间的生产负荷再次重新排序,排序后的车体被送往总装车间完成内饰、仪表盘及发动机的安装。
由此可见,WBS和PBS是整车生产过程中的两个重要缓冲区。这两个缓冲区的控制效果也影响了油漆车间的原料消耗和总装车间的生产效率。通常,WBS和PBS都采用立体车库式的存储模式(图5),每个存储单元的存车和取车操作由堆垛机按照预先设立的规则来完成。
那么,由WBS缓冲区取车送往油漆车间的操作应符合如下规则:必须将至少三辆以上的相同颜色的车体排成一组,送往油漆车间;必须将交货日期还剩一周的车体送往油漆车间;在此缓冲区的车体排序不考虑车型、内饰选项等车身数据。
由PBS缓冲区取车送往总装车间的操作应符合如下规则:确保送往总装车间的车体所需安装的部件不能处于缺料状态;根据不同的车型所需的劳动强度,将不同车型的车体交叉排序送往总装车间,使得总装车间的工人的劳动负荷处于均衡状态;在此缓冲区的车体排序不考虑车身颜色。
这两个缓冲区的控制难点在于:需要建立缓冲区的车体跟踪的数据模型,该数据模型应该记录缓冲区内和离开缓冲区的车身队列中每个车身标签数。控制程序应该从数据模型中读取数据,获知车体在缓冲区内和缓冲区出口处的分布,并根据预先设定的算法从缓冲区选出合适的车体。
如果采用传统的PLC控制,缓冲区的跟踪数据模型势必要建立在PLC的数据寄存器中,这将占用大量的PLC数据寄存器。设想一下,缓冲区内有100个存储单元,每个存储单元所存放的车体的标签数据需占用30个字,那么建立该数据模型需要占用3000个数据寄存器。然后,PLC中的控制程序需要使用查询、比较等指令完成车体的选择。车体排序的算法由PLC中的梯形图程序来实现(图6),这对擅长处理逻辑运算的PLC来说,并不是一件简单的任务。

这种控制方案的缺点在于:PLC的数据存储区容量有限,所建立的跟踪数据模型规模有限;利用PLC程序比较难于实现按车身属性数据统计车体分布情况;车体排序算法完全由PLC梯形图程序来实现,修改算法和增加算法都比较困难。
CIMPLICITY Tracker软件的设计思路
CIMPLICITY Tracker是一个专门用于汽车生产跟踪的软件包,它是实现汽车生产过程跟踪的众多解决方案中的一种。CIMPLICITY Tracker通过读取安装在生产线上的条码扫描器、RF Tag读写器的数据,在计算机中为每个通过生产区域的车身对象建立数据记录,从而跟踪每个车体的当前位置及其车身属性数据。一个典型的CIMPLICITY Tracker系统构成如图7。
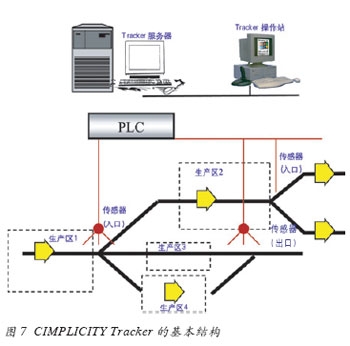
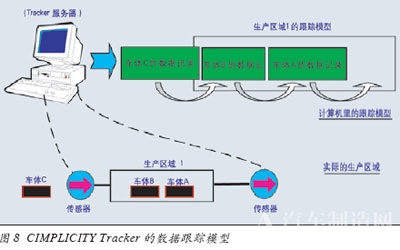
由图7可见,安装在各生产区域的入口和出口处的传感器探测进入和离开生产区域的车身数据,这些数据被PLC收集并汇报给CIMPLICITYTracker服务器。CIMPLICITYTracker软件包为每个进入生产区域的车身对象创立一个数据记录,每个数据记录包含多个字段,这些字段分别记录了被跟踪对象当前所处的生产区域、跟踪对象在区域内的位置、跟踪对象的类型(如:车身、侧围)和其他属性数据(如:车身颜色、车型、内饰)。这些对应于每个车身的数据记录被CIMPLICITY Tracker内部的数据库保存,并随着缓冲区入口和出口处传感器数据的变化和缓冲区的跟踪类型而不断更新数据库中的数据记录的内容。例如,如果用户将生产区域1的跟踪类型设定为“递推(Shift)”型(图8),一旦生产区域1的入口处的传感器探测到车体C(车身的标签数据)进入跟踪区域,CIMPLICITY Tracker数据库中对应于车体A和车体B的数据记录的位置字段的数值会加一(即:向前移动一个位置),车体C的数据记录的生产区域字段会更新为“生产区域1”,这表明车体C已经进入了生产区域1。
CIMPLICITY Tracker的路由选择控制功能
除了对生产区域内的车身对象进行跟踪之外,CIMPLICITY Tracker还能根据当前跟踪模型内的车体分布状况和外部条件,按照用户预先设定的规则对跟踪模型内的车体的下一个加工路径进行自动优化选择(图9)。
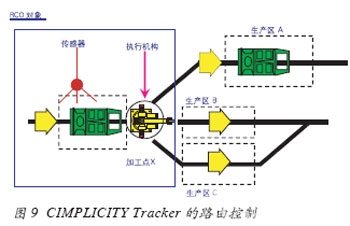
当车体C到达加工点X时,车体C面临三种加工路径的选择。车体C下一步该进入哪个生产区取决于如下因素:三个生产区内的车体分布情况、车体C后续车辆的分布情况、某些影响生产的外部条件。
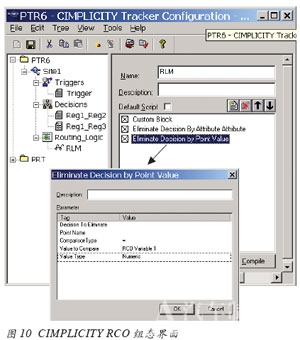
CIMPLICITY Tracker将上述加工路径选择点看作是一个RCO(RoutingControl Object)对象,跟踪模型中的所有数据记录(即:所有生产区域内的车体分布状况)可以参与选择加工路径的运算。此外,CIMPLICITYTracker内置的多种功能块可以方便地帮助用户创建选择加工路径的算法。图10是CIMPLICITY Tracker软件提供的图形化的RCO组态界面。
CIMPLICITY Tracker计算出车体的下一步加工路径后,计算机会将控制数据下载给PLC,最终由PLC控制执行机构将车体送达指定区域。与传统PLC的梯形图程序相比,采用CIMPLICITY Tracker完成生产跟踪和加工路径控制有如下特点:
● CIMPLICITY Tracker使用图形化的组态界面,面向对象的解决方案,组态灵活,易于理解和维护。
● CIMPLICITY Tracker利用PC的高速处理能力和大容量的存储能力来跟踪被加工的车体对象。PLC的内存及其运算能力决定PLC不能完成复杂的跟踪任务。
CIMPLICITY Tracker具有丰富的内置功能块和算法,可以对车体对象的各种属性进行统计,如对车体对象进出某个加工区的次数进行统计等。这些功能都通过可组态的方式提供给用户,非常易于使用。如果使用PLC的梯形图程序来实现这些功能,则会消耗大量的PLC内部资源。
● CIMPLICITYTracker作为CIMPLICITY HMI软件包中的一个组件,跟踪数据可以方便地通过HMI中的数据点(虚拟点)集成到监控画面中。用户通过监控画面即可以了解到生产跟踪信息。
基于CIMPLICITYTracker的总拼工段控制方案
基于CIMPLICITYTracker的总拼工段控制方案将使得车身底盘与车身侧围的匹配跟踪更具柔性化和可视化。首先,车身底盘在进入总拼工段之前即被生产跟踪系统的条码扫描器读出车身型号,并在跟踪模型中为该车身建立数据记录。跟踪模型中的数据记录反映了即将进入总拼工段的车身底盘排序情况,这些数据可以由运行CIMPLICITYTracker的计算机通过网络传送到车身侧围的取料控制器和显示工作站,用于控制和显示车身侧围上料的次序,确保车身侧围的排序与车身底盘队列匹配。具体控制系统结构如图11所示。
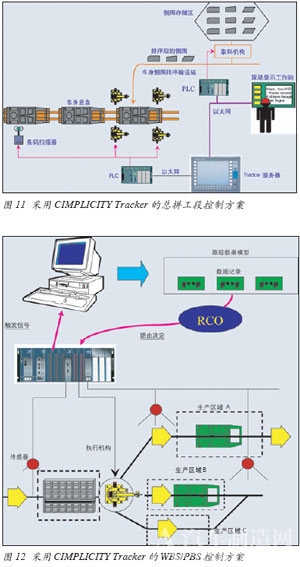
采用了CIMPLICITY Tracker的总拼工段控制方案具有如下特点:实现了车身底盘和车身侧围在总拼过程中的全程跟踪;利用CIMPLICITYTracker的图形显示功能,车身底盘和车身侧围的排序分布情况可以动态地显示在计算机屏幕上,方便生产管理人员查看和操作;使用一条车身侧围输送链完成侧围队列的输送,取消了多条缓冲链的设置,简化了车身侧围缓冲区的构造。
基于CIMPLICITY Tracker的WBS和PBS控制方案
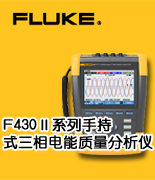
对WBS和PBS缓冲区内数量众多的车体的跟踪是 Tracker的又一典型应用(图12)。为了建立跟踪模型,两个RF Tag读写器需要被安装在缓冲区的入口处和出口处。当新车体进入缓冲区时,RF Tag读写器将读取车身上的标签信息,对应该车体的数据记录也随即在跟踪模型中被建立。CIMPLICITY Tracker通过接收缓冲区入口处和出口处的RF Tag读写器汇报的车身数据,来刷新跟踪模型中的数据记录,以保证跟踪模型中的数据记录实时反映缓冲区内的车体分布。
利用CIMPLICITY Tracker的路径选择功能可以对缓冲区的取车排序实行优化控制。由于缓冲区内的所有车身数据都被保存在跟踪模型中,用户可以通过调用CIMPLICITY Tracker的内置功能块对跟踪模型中的数据记录作分析和判断,决定取出合适的车体送往下一个生产车间。CIMPLICITY Tracker所作出的取车决定将通过数据命令下传给PLC,并由PLC控制堆垛机完成取车操作。取车操作完成之后,PLC通过数据字通知CIMPLICITY Tracker可以开始下一个选车的运算。



 关注本刊微信订阅号
关注本刊微信订阅号